










 WORKNC mecanizado con Robot
WORKNC mecanizado con Robot
WORKNC integra el módulo WORKNC Robot para simulación y edición de trayectorias que permite el control de todos los tipos de robots. WORKNC Robot
utiliza la gama completa de Trayectorias WORKNC para operaciones de mecanizado, seguimiento de curva 3D, mecanizado de bordes de cuchillas de estampación, soldadura y pulido.
La simulación de trayectoria dentro del entorno de celda de robot completa garantiza resultados libres de colisiones y tiene en cuenta las características y restricciones específicas del robot.
Caractarísticas principales
|
|
Fácild e usar
La interfaz gráfica de usuario de WORKNC Robot ofrece una programación fácil, rápida y precisa que resulta en la generación de trayectorias de herramientas complejas para todo tipo de materiales y máquinas. Este proceso de programación simple permite a los fabricantes obtener todo el potencial de sus robots.
Todas las estrategias de WORKNC (3, 3 + 2 o 5 ejes simultáneos) pueden emplearse para cumplir con los diversos trabajos de fabricación, tales como fresado, corte de piezas, etc., con los equipos disponibles en el taller.
WORKNC Robot reemplaza el ciclo de aprendizaje punto a punto para el recorte de piezas.
Requisitos específicos
Hoy, además de las aplicaciones de fresado, WORKNC ofrece soluciones en otros campos.
Contorno de corte en herramientas de estampación controlada por WORKNC permite que este proceso, a menudo hecho de forma manual, se automatice y los cabezales láser se monten en fresadoras o robots NC.
WORKNC Robot genera trayectorias en formas geométricas complejas (mallas STL o superficies Nurbs) que se pueden personalizar para soldaduras con láser o antorcha.
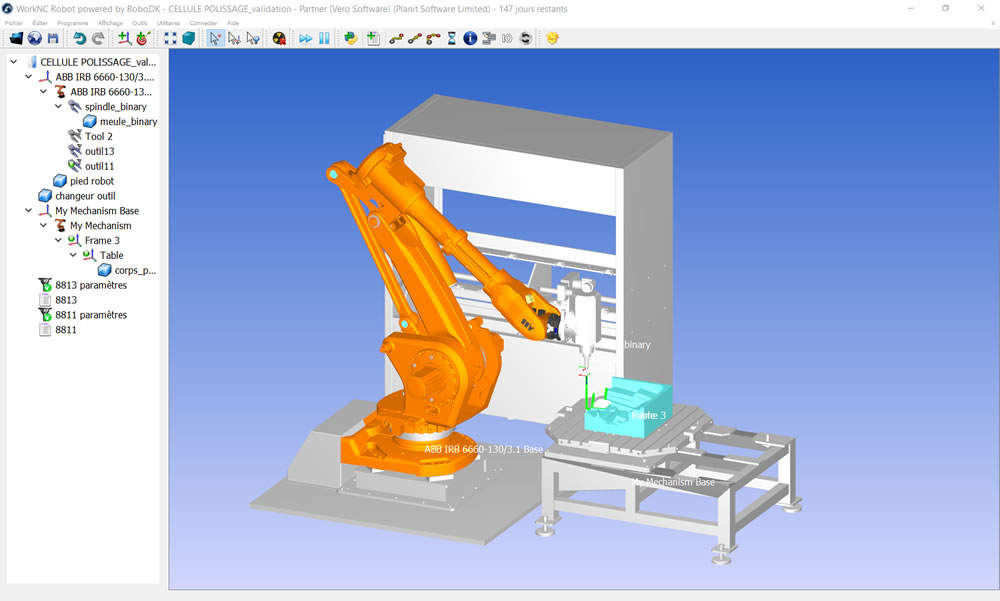
Simulación
Los movimientos de robot "complejos" requieren un modelo CAD preciso de la célula del robot para detectar posibles colisiones entre diferentes elementos como el robot, el cargador del cambiador de herramientas, la mesa u otros soportes, ejes suplementarios y barreras de seguridad.
Optimización de trajectorias - Singularidad
Las trayectorias pueden provocar problemas de singularidad en muñecas y brazos de robots. WORKNC Robot puede detectar automáticamente las posibles condiciones de singularidad en las trayectorias y advertir a los operadores para que puedan tomar la acción adecuada.
La simulación dentro de la aplicación Robot permite optimizar los movimientos del robot. El módulo ofrece configuraciones de robot o posiciones complementarias para asegurar trayectorias optimizadas.
La alta precisión de trayectoria garantiza productos terminados de alta calidad.
Diferentes procesos o configuraciones de células
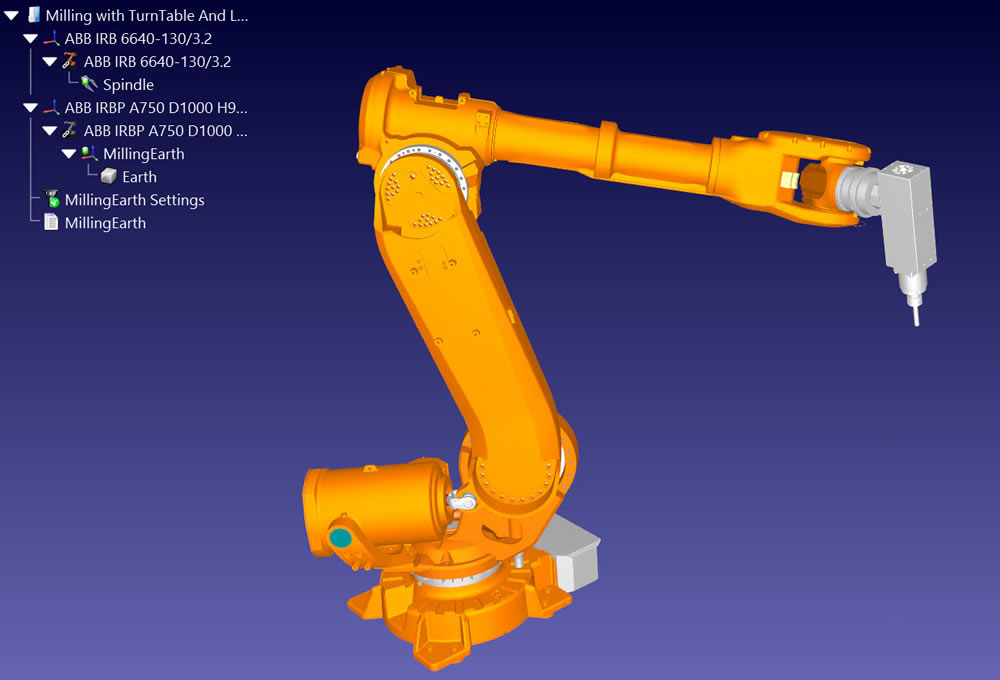
Herramientas de corte montadas en robots
Una configuración de celda de robot con herramienta de corte permite el mecanizado o la aplicación de diversos procesos en partes muy grandes y pesadas.
Este proceso ofrece la posibilidad de cambiar las herramientas o equipos de mecanizado en el robot gracias al uso del cargador de herramientas. Varias herramientas se pueden colocar simultáneamente en la cabeza del robot.
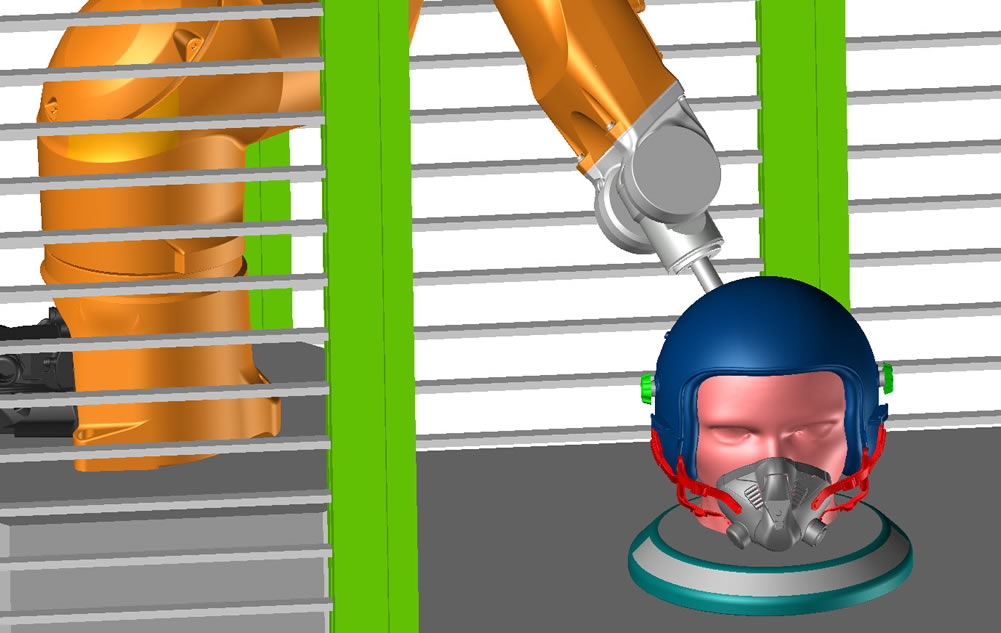
Piezas montadas en robots
Este tipo de solución se propone para fines de producción en serie en piezas más pequeñas limitadas por capacidades de robot.
Este proceso permite que las celdas automatizadas se controlen desde las bandejas de carga en una cinta transportadora para completar el mecanizado y colocar la pieza de nuevo en la cinta transportadora.
Cinemática
WORKNC Robot puede pilotar cualquier tipo de robot de 4 a 7 ejes, así como ejes adicionales como mesas giratorias, robots montados en rieles, pórticos con 3 ejes lineales, etc.
WORKNC Robot ofrece una biblioteca con más de 250 máquinas existentes, de más de 22 suministradoras.
Tipos de robots
WORKNC Robot se puede adaptar a todas las marcas de robots.
El postprocesador WORKNC Robot, configurable según las instalaciones de producción, crea programas que pilotan todo tipo de robots teniendo en cuenta todos los parámetros posibles gracias a un simulador específico dedicado a cada controlador:
- STAUBLI (VAL3, Version 6 & 7)
- ABB
- FANUC
- YASKAWA_Motoman
- KUKA
- …..